Arushi Nath, Grade 4 The 2019 Toronto Science Fair was held on 6 April 2019 at the University of Toronto, Scarborough. Hundreds of school children were there to demonstrate their […]
Arushi Nath, Grade 4
My robot and I are happy that we got a participation medal and a certificate!
The 2019 Toronto Science Fair was held on 6 April 2019 at the University of Toronto, Scarborough. Hundreds of school children were there to demonstrate their projects and experiments. There was a big crowd of students, parents, teachers, and volunteers.
My robot waiting for the action to begin at the Toronto Science Fair 2019
I enjoy participating in the Toronto Science Fair. It was the third time I was participating in it. As soon as we arrived at the Fair, we were divided into smaller groups based on our ages. We were then taken to our exhibit area where we put up our projects. Then we were taken out to undertake a science activity. We learned about the science behind ramps. All of us made them using rules, marbles, cups, and a bucket. We then came back to the exhibit hall. Each one of us then demonstrated our projects to other kids in the group and could ask questions. I enjoy this part the most where I get to see projects in action and also demonstrate mine.
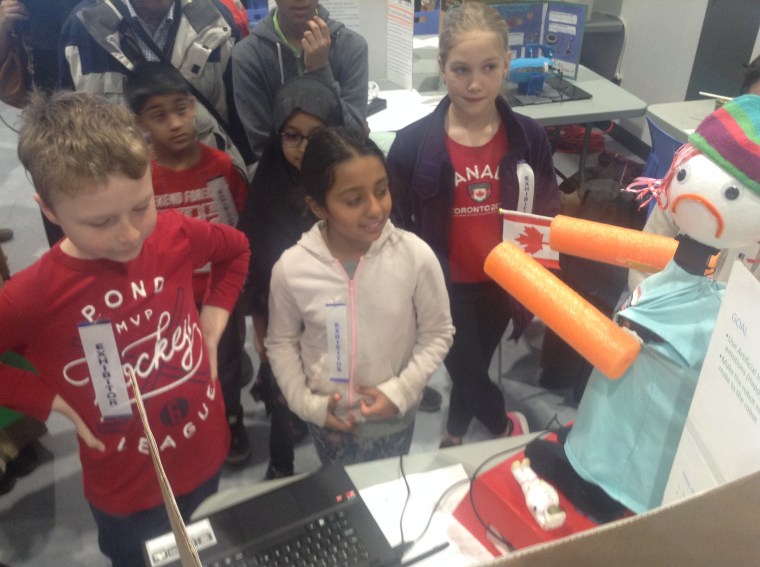
Arushi demoing the robot to other kids in the group
This year I made a new robotic project: Make A Robot Smile (MARS) bot which used Artificial Intelligence to detect human facial expressions.
The robot had a sad face to start with. As soon as it detects a happy face in front of it, it turns its face to show a happy face and also raises his arm to wave the Canada Flag!
Goals of the MARS Bot
Use Artificial Intelligence to detect facial emotions (Happy or Sad)
Make the robot move depending on the face you make to the robot
How does the MARS Bot work?
1. The camera detects if a human face is in front of the camera.
2. An algorithm written in Python analyzes the image to see if the mouth is curving up or down, the position of the eyes and the eyebrows.
3. The algorithm then makes a prediction if that face is happy or sad.
4. It transfers the signal from the laptop to an Arduino microprocessor using a Serial Bridge.
5. The Arduino controls the arms and neck servos and makes them move depending on the facial emotions detected.
Give a demo to the parents present at the Toronto Science Fair
Materials Needed
Arduino
3 Servos
6-volt power supply
USB Cord
Laptop with a camera
How did I make the Robot?
I made the robot using an old plastic can used for storing cooking oil. The arms and legs of the servo were made using pool noodles. I used my old socks, old woolen hat, and a tee shirt to dress up the robot. The face was made using styrofoam ball and the hair using thin ribbons. Putting the Googly Eyes on the robot was the most fun part! A ruler was put on the back of the robot to keep it straight.
Attaching an Arduino to the oil container to the make the body of the robot
Programming
I had to programme the robot in both Python (for facial emotions detection) and Arduino (for making the robot move). Learning how to transfer commands from python to Arduino was something new for me.
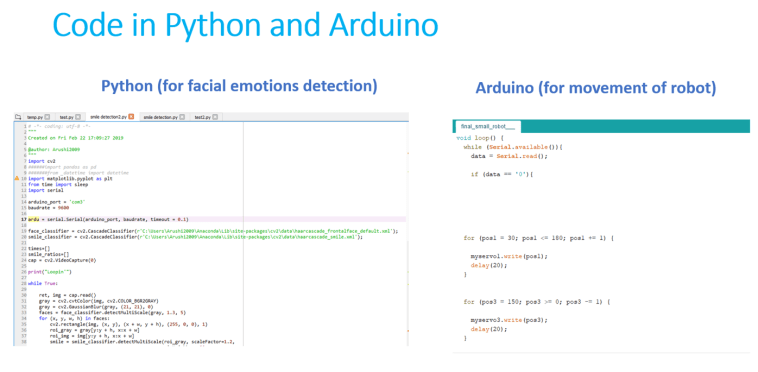
Programming MaRS bot in Arduino and PythonA sample of my code
Challenges Faced
I spent a lot of making the project. I made it in bits and pieces over several weeks in the evenings after school and on the weekend. Some of the challenges I faced:
Making both hands of the robot go in the same direction accurately using servos was difficult
It took me time to learn how to transfer Python data to Arduino
Answering questions from many kids who kept coming back to smile at the Bot
Future Plans
I want to detect more human emotions such as surprise and scared.
I want the robot to be able to smell the surroundings. For example, it should be able to smell a flower and say whether it smells good or not.
I want to make a Robot Family with different kind of robots powered by Artificial Intelligence.
At the end of the science fair, we all received a participation certification and a medal. My robot and I were very happy. Thank you Toronto Science Fair. See you in 2020!
2025 Third Grand Award, International Science and Engineering Fair, USA. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.