The HotPopRobot family team project: S.N.A.C.K (Smart Street Navigation Using Artificial Intelligence for City Kids) was among the Top 5 TD Elevate Hackathon Winners. Artash (Grade 7) took lead in […]
The HotPopRobot family team project: S.N.A.C.K (Smart Street Navigation Using Artificial Intelligence for City Kids) was among the Top 5 TD Elevate Hackathon Winners. Artash (Grade 7) took lead in analysing the open data from City of Toronto and writing machine learning algorithm, Arushi (Grade 4) was responsible for planning the physical demo, coding the Arduino and wiring the relays and lights, and Vikas (dad) was responsible for creating the presentation, and submitting the project in time.
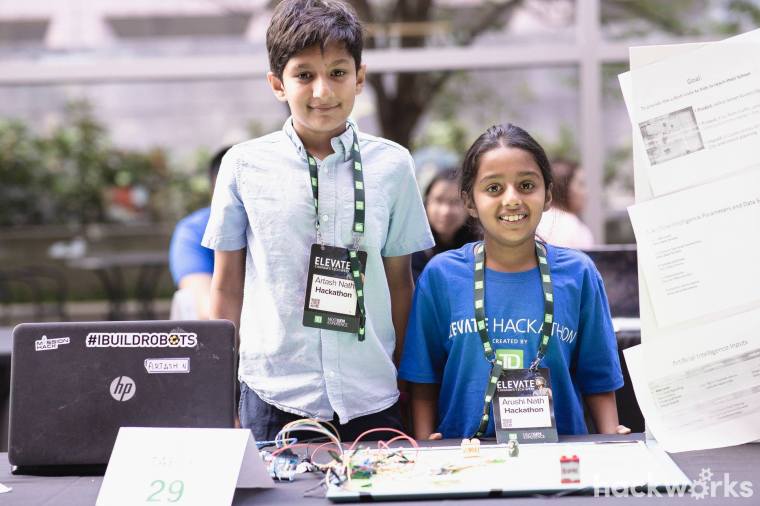
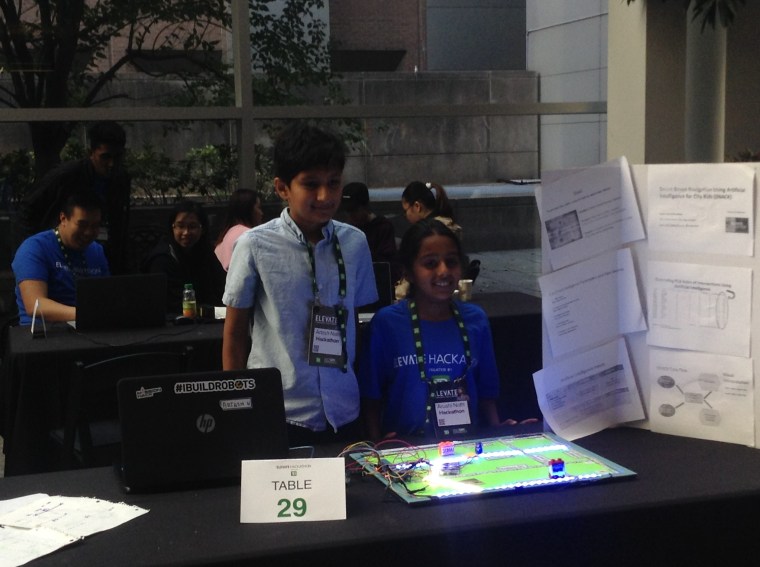
Artash and Arushi with their S.N.A.C.K project at TD Elevate Hackathon
The TD Elevate Hackathon was held at the MaRS Discovery District from September 21-23, 2018 as a part of the week-long Elevate Festival. It was the biggest hackathon ever organized in Toronto with over 600 participants and almost 80 teams submitting their solutions.
The S.N.A.C.K project on using Artificial Intelligence to find the safest path for kids to walk to school – among the top 5 teams (out of 80)
The theme of the Hackathon was “Smart City” and teams (between 4-8 people) had to submit solutions on any of the 3 challenges: Smart Economy, Smart Vibrant Living, or Smart Connected Communities. Over 80 teams submitted their solutions at the end of the hackathon for the first phase of judging. They had 5 minutes to present their solution to a group of judges in a science-fair style set-up. Expo judges then judged the top 5 solutions to move to the final stage. We ended up among these 5 top solutions!
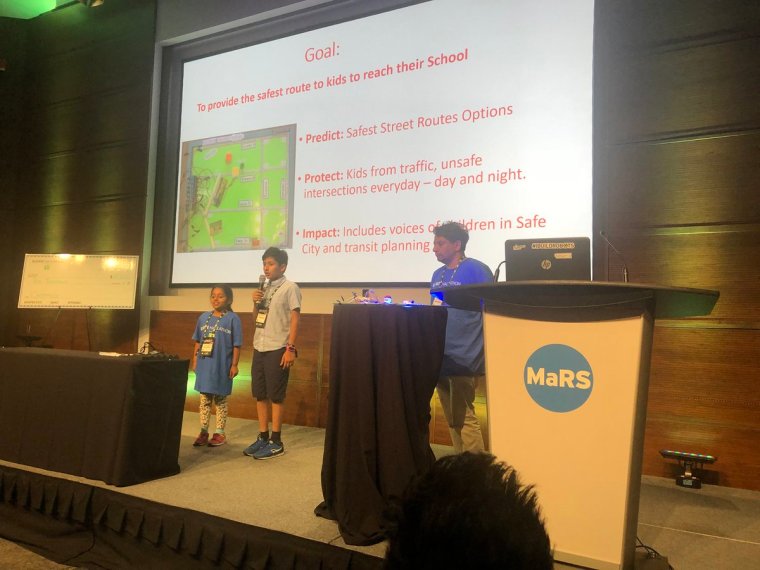
Artash and Arushi explaining their project to the judges in the final round
We took upon the connected communities challenge. The goal of our S.N.A.C.K project(Smart Street Navigation Using Artificial Intelligence for City Kids) was to find the safest path for kids to walk to their school and other places. This was based on our felt needs as we try to walk and bicycle to most places in downtown Toronto. As we are all learning Machine Learning on our own as a family learning activity, we created a project that built upon Artificial Intelligence and Arduino with our goal of making streets safer for children.
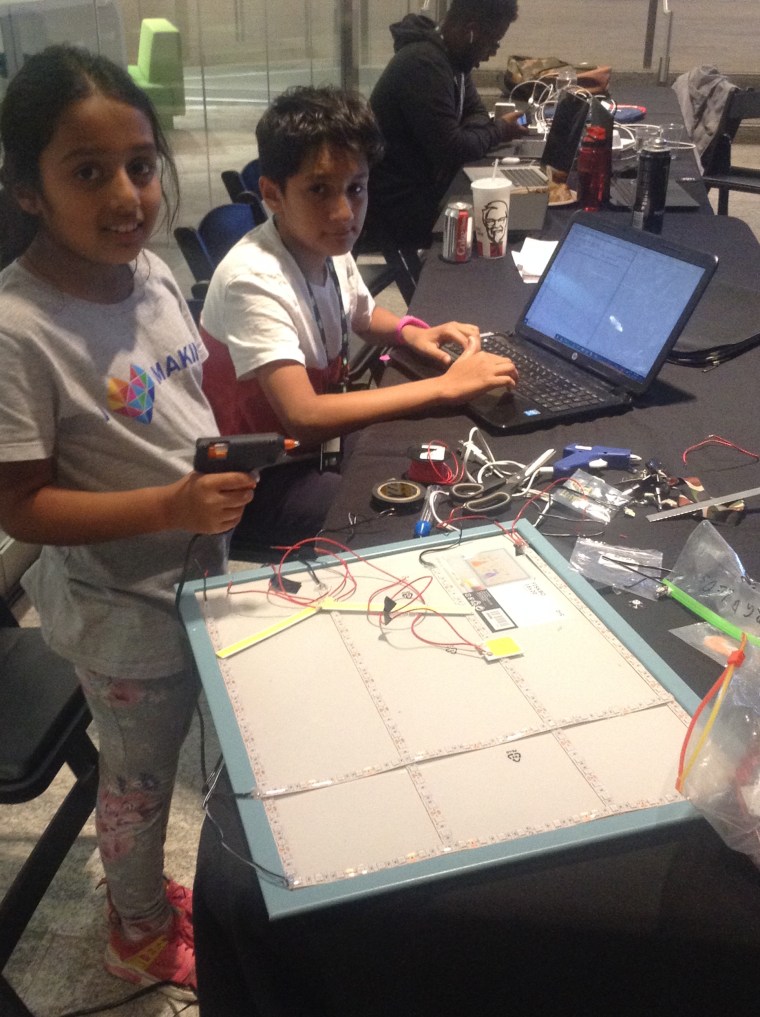
The Making of SNACK Project: AI Algorithm, Python, Arduino, and team efforts
The S.N.A.C.K project uses data from 5 databases from Open Data Toronto and Vision Zero Toronto document. It includes a database of city schools and parks, bicycling lanes, enhanced pedestrian safety traffic signals, school crossing guards, and pedestrian fatalities.
All our ideas start by using pen and paper
The artificial intelligence algorithm uses a feed-forward neural network created in python to predict the risk index of all intersections in Toronto. The neural network’s 5 input nodes would receive data about the crossing and the output node would provide the risk index. We trained the model based on crossings that we had manually assigned risk indexes so that the model could make predictions similar to the ones a human would make.
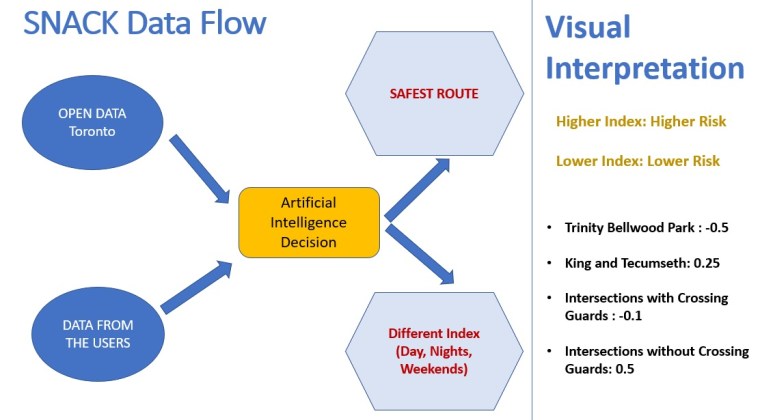
S.N.A.C.K Data Flow Frame
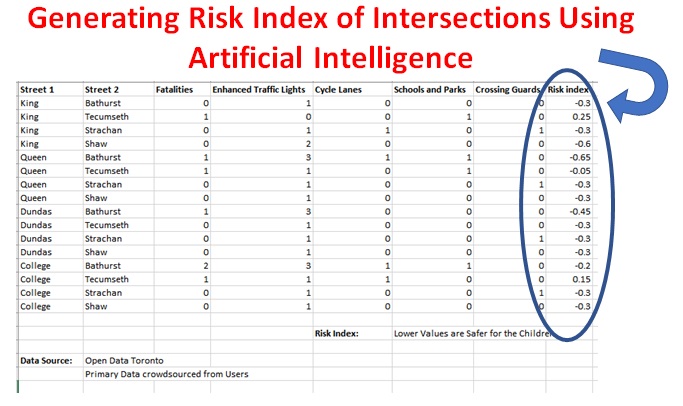
S.N.A.C.K generates a risk index associated with each intersection in Toronto. For the purpose of the hackathon, we limited our project to 20 intersections. The index value could be negative as well as positive. The higher the value, the higher the risk associated with that intersection and vice versa. For instance, streets which have bicycling lanes or pass through school parks, or intersections which have enhanced pedestrian safety crossing, School Crossing Guards, and lower prior pedestrian fatalities rate, would score a lower risk index. Whereas streets which have limited pedestrian-friendly features would score a higher index.
Risk Index generated for Toronto Intersections using Artificial Intelligence
Based on this data, it was possible to generate the safest path a kid could take to go from school to home. Unlike Google Maps, this path would not provide the fastest walking route but the safest walking route. This would provide greater comfort for parents and children that they are making an informed decision in selecting a particular walking path.
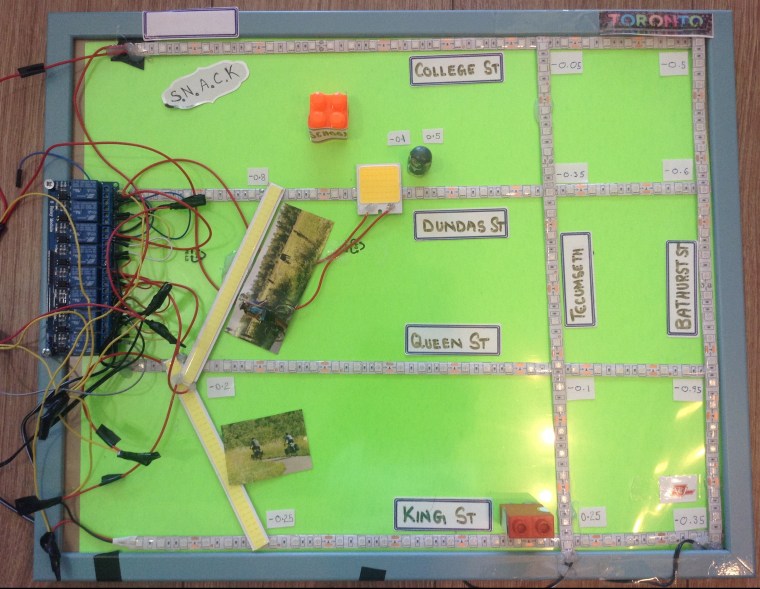
Physical Demo of our S.N.A.C.K project showing Toronto street intersections with Risk Index to find the safest walking path for kids
As the project is focused on kids, we wanted to build upon a walking path which would be based on landmarks that are familiar to kids. For instance pizza shop, parks, libraries, swimming pools or other places they frequently visit. Furthermore, any new path would be iteratively built upon the path the kid has previously walked on, rather than a totally new path. This will ensure that the kid can confidently take the safest route to newer places.
Project Demo – working perfectly and ready for the judging!
Interestingly as more kids using the S.N.A.C.K project, it would create a database of paths most frequently used by children and in turn, will influence the risk index associated with the intersections. It will also provide feedback to city planners so that they can increase safety features or deploy school crossing guards on streets most frequently used by children.
Giving demo of our project to visitors during the Elevate Festival and Hackathon
We had an amazing time conceiving, designing, building up, test and demoing this project. We worked very hard over the 2 days as we had to build everything from the start including procuring data, building up the algorithm, testing it, creating the physical version of the project demo using Arduino, lights, and relays, and preparing for the presentation.
The HotPopRobot Team!
We thank the organisers of the Elevate Festival, HackWorks (the organisers of the hackathon), the City of Toronto (for providing the data), the volunteers, judges and hundreds of visitors who were interested to learn more about our project. We are continuing to work on this project and would welcome guidance and support to improve it so that we can make Toronto Streets safe for the kids.
2026 Third Place, Student Oral Competition, NASA Exploration Science Forum, USA. 2025 Third Grand Award, International Science and Engineering Fair, USA. NASA Group Achievement Award 2025 (DART mission team). 2024 Youth Can Innovate Award ($7,000) and Silver Medal, Canada-Wide Science Fair. Gloria Barron Prize for Young Heroes 2024. Eureka Changemakers Fellow 2025. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.
Follow Us on Twitter
Do it Yourself Asteroid Astrometry using Python for Asteroid Apophis
The Masked Scales; 2020 NASA SpaceApps COVID-19 Challenge Global Winners!
Deep Space Musical: NASA SpaceApps 2018 Toronto Winner
LIGO Quadruple Pendulum: Swinging to Stability, Royal Astronomical Society of Canada 2019
TVO Kids (2018): TRAPPIST-1 Sound and Light Model
Lecture on TRAPPIST-1 at Carr Astronomical Observatory (CAO) Open House
Yes I Can / Oui Je Peux: NASA – Canadian SpaceApps Toronto 2017 Winner
Drop the Drought : NASA Space Apps Toronto 2017 Winner