On July 28, 2019 (Sunday) the first Ontario Rover Rally was held at the McMaster Innovation Park in Hamilton, Ontario, Canada. The event was organized by a committee of undergraduate […]
On July 28, 2019 (Sunday) the first Ontario Rover Rally was held at the McMaster Innovation Park in Hamilton, Ontario, Canada. The event was organized by a committee of undergraduate and graduate students of McMaster University with mentorship from the McMaster Engineering Society and Faculty of Engineering, the Canadian Mars Society, and the Canadian Space Technology Advancement Group. The rally was the first of its kind in Ontario, with the only other North American rover competition being held in Alberta and Utah.
Group picture of all the Rover Rally Team Members from different universities
The Ontario Rover Rally was a very unique and exciting event. One of its objectives was to provide local teams a venue to compete on Mars exploration related challenges in a low-risk environment, to test new technologies, and to have the opportunity to participate, even without a fully operational Rover. It had 3 segments spread over the entire day. These were:
The Rover Challenge
The Design Challenge
The Science Challenge
The challenges were designed to test a team’s rover capabilities, creativity, and knowledge of Mars. This seemed to be a great idea to explore all aspects of a mission to Mars. Not every team had to participate in all the 3 challenges. We participated in the Rover Challenge!
HotPopRobot team at the Mc Master Innovation Park
Our Mars Rover
We were excited to participate in our first rover rally. We spent several weeks building up over Mars rover from scratch. Our Rover was a four-wheel driver powered by four IG42 motors running on 24 volts supplied by NiMh rechargeable batteries. It was a relatively light rover (around 15kgs) that could be controlled using a Radio Receiver and Transmitter. The two left wheels and the two right wheels were connected to a sabertooth driver and the rover had a quick turn, spin and reverse capabilities. We were building computer vision and autonomous components too using stereo vision but these could not be completed in time.
Arushi fixing the motor driver on our Mars Rover
We assembled all the components, drilled holes, wired them, tested them, made changes and continued with modifications until we were satisfied with its performance and stability. This gave us a good experience of mechanical engineering, electric engineering, and navigation and communication protocols.
Artash fixing the back wheels with duct tape: they go punctured early during the race. There cannot be a mission to Mars without duct tape.
From our previous experiences of fighting Battlebots, we had the learned the advantages of keeping our rover simple, stable, sturdy and fixable. In the heat of battle or racing, it is important that we know every part of our rover and its performance so that errors can be fixed and parts can be replaced easily and quickly in case they get damaged.
The fact that we had assembled together every part of the rover, it was light and had minimum features, we were confident that it would work well and be able to cover a lot of distance without needing battery recharge.
The Rover Challenge
In the Rover Challenge, the teams had to race their rover against another team on an improvised racing track simulating Martian environment. The track was over rough and uneven ground, it had obstacles (stones), turns, an incline, a drop, and a pit stop where the rover had to pick a tool before proceeding to the finish line.
Meetings of Rover Drivers from different teams
The rovers were untethered and could be controlled by radio. They were not required to operate autonomously, could not have an airborne component and the maximum weight permissible for the rover was 50 kgs.
We arrived early at the venue which was the field outside the McMaster Innovation Park. There were rover teams from the University of Toronto, the Ryerson University and the York University, alongside our team (HotPopRobot).
Team members (Artash and Arushi) giving a demo of the Rover to the judges.
The day was calm and clear – perfect for the rover rally. As with all rover challenges, it started with briefings on rules and regulations of the rovers challenge. It was followed by a safety check and demonstrations. Each rover needed to have an emergency stop button (or the kill button) which would cut off the rover from all power to bring it to a quick stop. This is an essential safety feature so that the rover does not harm people and itself (Asimov Laws of Robots!) in case something goes wrong.
Ready for our first race against the rover from University of Toronto
Our safety check went off well. We gave a short presentation of our rover to the judges, how we made it, its features, and the challenges we faced in making it. It was followed by the demonstration of the rover capabilities and the safety check. Our rover passed without any issue as we had taken care to place a very big and visible kill switch, had covered all the exposed wires with insulation and covered it with cardboard and duct tape so that it was protected against the elements, including winds and rain forecast for later in the day.
Rovers clearing the obstacles at the track simulating Martian environment
Our first race was against the rover from the University of Toronto (UofT). They had a great rover with lots of capabilities and ample ground clearance. Unfortunately, their rover was much heavier than ours and was a little slower than ours. Our rover performed very well, even though two of our back wheels had punctured earlier during the day and we had to duct tape them to keep the air in. Our rover had some difficulties in climbing the incline because of lower clearance and punctured back wheels. Nevertheless, it still crossed the finish line first in around 2 minutes.
The Rover from the Ryerson University competing against rover from the York University
Our second race was against the rover from Ryerson University. The had a very sturdily built, first and responsive rover. We especially liked the wheels of the rover as they had very traction. It was a very fast rover which could easily clear obstacles and climb inclines. Our rover gave it a good match initially but our rover got stuck early on an obstacle on the account of its low ground clearance and could not then catch up with the Ryerson University’s rover. We lost that race.
The University of Toronto team with their RoverRover from the York University successfully navigating the Incline
When the results were announced based on wins and timings, our rover had come second. Ryerson University came first with their rover. It was very encouraging for us as this was our first rover racing competition and it was a totally new and untested rover. We were happy with the results. We had learned a lot from rovers belonging to other teams and have plans to improve and upgrade our rover with better wheels and adding some sensors and cameras.
Prepping for the Finals: our rover raced against the rover from the Ryerson UniversityThe Ryerson University team with their winning Rover
The Design Challenge
To drive a rover on Mars, one needs to first put a rover on Mars. Mars has a very thin atmosphere so it is not easy to land things on Mars surface safely and without damaging the payload and science experiments.
Payload being prepared to be dropped using a parachute. The payload should arrive safely with minimum acceleration
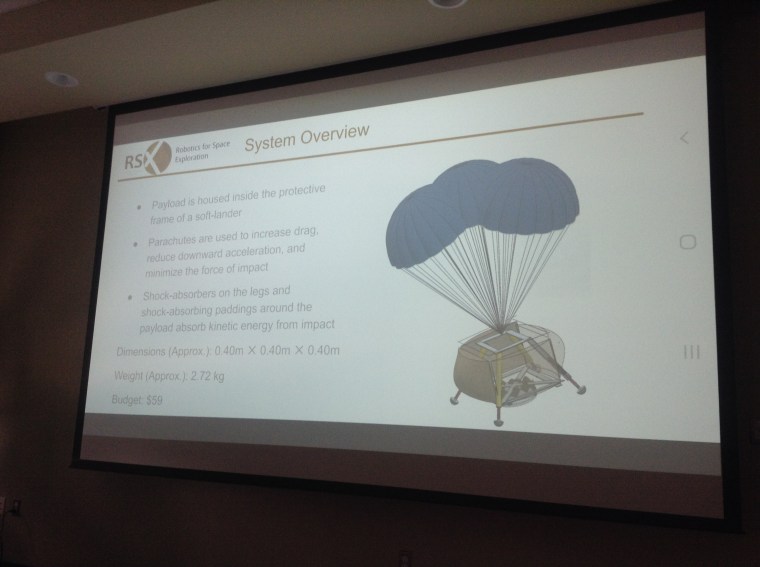
The Design Challenge was meant to address this issue. The teams will attempt to build a device to protect a 3 kg payload as it descends from orbit. Designs will be dropped from a height of 24 m and measured with an accelerometer. The teams had to make a device, shroud, or any other mechanism to protect their cargo as it descends from the orbit. Points would be given for the smallest experienced acceleration while points would be removed for weight.
Payload being released from the top of the McMaster Innovation Park building simulating Martian descent
There were 2 participating teams: both used parachutes for deploying their payloads. An accelerometer was fitted into their payloads to measure their acceleration when they were deployed from the roof of the McMaster Innovation Park building. Each team gave a presentation about their project to the judges and the audience – about the idea they came to slow down the acceleration and protect the payload. This was followed by an actual demonstration and measurement of accelerations.
Presentation on Design Challenge underway at the Ontario Rover Rally
Needless to say, it was very thrilling to see an object being dropped from the top of the building and seeing the parachutes deploy. Unfortunately for the first team, their payload stuck some of the pipes towards the bottom of the building and their payload was slightly damaged as it did not fall in the planned way. This shows the perils of landing things on Mars (or from the top of the building) and a reminder of how things can still go wrong unexpectedly in spite of all the preparations.
Presentation of University of Toronto (Robotics for Space Exploration) on their Soft Lander
Launching things to space is inherently risky – we can reduce the risks but not completely eliminate them. The experiment was repeated once again towards the end of the day with success.
The Science Challenge
Now that the rover has landed on Mars, and has demonstrated its driving and navigation capabilities, it is important to get started on the science aspect. The big question that has been on everyone’s mind is: Is there life on Mars?
The teams came with different “Special Regions” they would like to explore on Mars as a part of the Science Challenge
And the only way to answer the question if Mars once harbored life or if it still has life on it, is to find scientific evidence of it. In this challenge, the teams would devise an original experiment to detect signs of Martian life, keeping terrestrial contamination and Martian geology in consideration. Where would the rover land, what scientific apparatuses it would carry and what science experiments it would do, which could provide conclusive evidence of life?
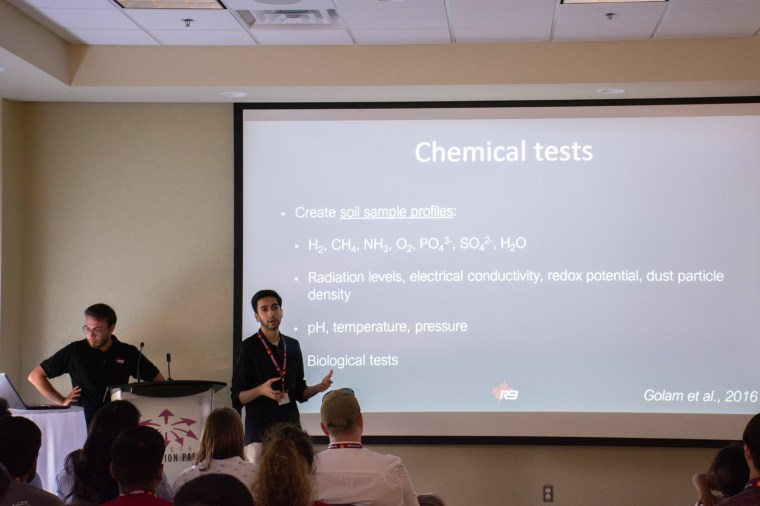
Presentation on chemical tests that would be done by the rover on Mars to evaluate possibilities of microbial life
There is a small but importantly not insignificant chance that Mars once hosted microbial life, or still does today. For that reason, there are certain areas of the Red Planet that are currently off-limits to future explorers, robotic or human. These are the Special Regions.
While we have put several rovers on Mars, they have never touched: The Special Regions. ”A Special Region is defined by the World Space Congress’s Planetary Protection Policy as a region within which terrestrial organisms are likely to propagate, or a region which is interpreted to have a high potential for the existence of extant Martian life forms”.
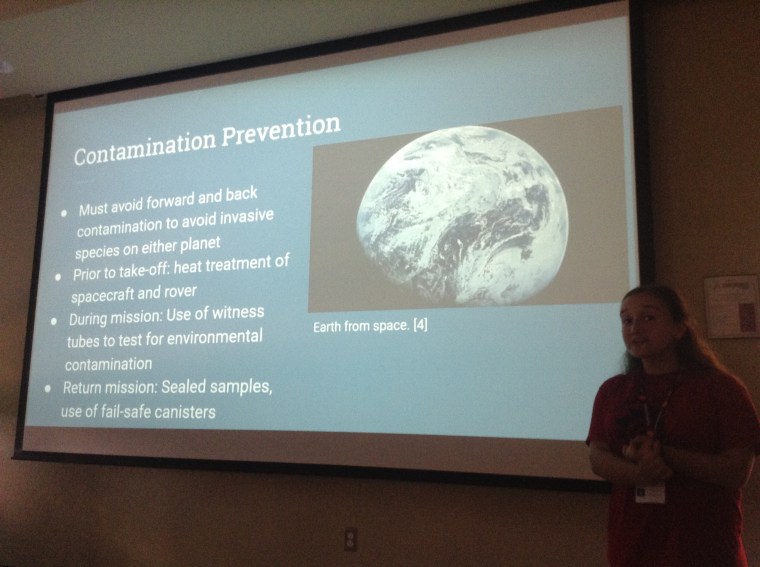
How to prevents Mars from getting contaminated by Microbial life from Earth was an important issue addressed by all the teams
In simpler terms, it is a region which has a water activity rating above 0.5 and therefore has the greatest likelihood, amongst all other regions, of hosting life. And we do not want to contaminate these regions with Earth microbes that hitch a ride on a spacecraft and result in false detection of life on Mars. The idea is to keep these regions out-of-bound until technologies improve sufficiently in the future for safer exploration that eliminates/minimizes the risks of Earth-based microbes contamination.
Presentation on one of the ways to identify life on Mars at the Ontario Rover Rally
In this challenge, the scenario is a futuristic one where the “Special Regions” become open to exploration. The teams had to come up with a scientific proposal on which region they would explore, what methods for collecting samples they would deploy (life, if it exists on Mars, is more likely to be sub-terranean), and what analysis they would do to find evidence of past life and ensure there are no false-positives through contamination?
This was a very detailed exercise and teams had given a lot of time and attention to come with great details of their Mars mission. Each team had come with a different region, and different sample collection methods and science experiments to evaluate for life on Mars. There were lots of questions from judges and audiences and we learned tremendously from this exercise about chemistry and biology of finding life.
Tour of McMaster Innovation Park
The Ontario Rover Rally was spread over the entire day from 10 am to 7 pm. The organizers had even arranged for a tour of the McMaster Innovation Park where we learned more about the research (on aging) being carried out there, and startups that were based in the building that formed an ecosystem that fostered innovations, student engagement, and public-private partnerships.
The tour of the McMaster Innovation Park. We learned about the startups and research being done on Aging which is driving innovations in the region
It provided us with a first-hand feel of how McMaster Innovation Park linked to the McMaster University is providing entrepreneurs, firms, researchers, industry partners, business mentors an avenue where they can connect and facilitate commercialization. This, in turn, attracts newer talent, students and researcher to the region from all over Canada and the world.
Thanks to the Organisers
The Ontario Rover Rally was very well organized. A passionate team of students and volunteers had worked very hard over several months to make it possible. They gave attention to every aspect of the event – from getting everyone together to prize distributing ceremony and making sure everyone left with a souvenir from the event. We especially thank the event Project Manager Maxwell Lightstone for his efforts and the team he put together to make this event possible. Everyone felt welcomed, appreciated and had a great time at the first Ontario Rover Rally.
Getting the second prize in Rover Race from the event Project Manager Maxwell Lightstone. Big thanks to you Maxwell and your team for organizing the first Ontario Rover Rally
The full-day event provided a wonderful way to bring together like-minded students and those passionate about science, engineering, and space! We plan to be back next year.
Artash talking with Mohit Aasi, President of McMaster Mars Rover Team on Machine Learning and Autonomous Vehicles
2026 Third Place, Student Oral Competition, NASA Exploration Science Forum, USA. 2025 Third Grand Award, International Science and Engineering Fair, USA. NASA Group Achievement Award 2025 (DART mission team). 2024 Youth Can Innovate Award ($7,000) and Silver Medal, Canada-Wide Science Fair. Gloria Barron Prize for Young Heroes 2024. Eureka Changemakers Fellow 2025. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.
Follow Us on Twitter
Do it Yourself Asteroid Astrometry using Python for Asteroid Apophis
The Masked Scales; 2020 NASA SpaceApps COVID-19 Challenge Global Winners!
Deep Space Musical: NASA SpaceApps 2018 Toronto Winner
LIGO Quadruple Pendulum: Swinging to Stability, Royal Astronomical Society of Canada 2019
TVO Kids (2018): TRAPPIST-1 Sound and Light Model
Lecture on TRAPPIST-1 at Carr Astronomical Observatory (CAO) Open House
Yes I Can / Oui Je Peux: NASA – Canadian SpaceApps Toronto 2017 Winner
Drop the Drought : NASA Space Apps Toronto 2017 Winner