Artash Nath (Grade 8) and Arushi Nath (Grade 5), Toronto ARTEMIS stands for Artificially intelligent Real-time Training by Environment, Mapping, Immersion, and Sounds. We love space, robotics and machine learning! […]
Artash Nath (Grade 8) and Arushi Nath (Grade 5), Toronto
ARTEMIS stands for Artificially intelligent Real-time Training by Environment, Mapping, Immersion, and Sounds.
We love space, robotics and machine learning! We have been building robots and rovers of increasing complexities for more than 6 years. These include line-following rovers, autonomous rovers, 30-pound battlebots, emotion detecting robots, drawing making robots and more.
Recently we have been excited about making intelligent robots. Robots that learn just like humans do and slowly become more intelligent every day. We have come across lots of intelligent robots. But most of them are good for specific tasks. For instance, a robot that plays games or a robot that cleans the house or a robot that sorts garbage or a robot that does surgery. These are very useful robots indeed and their algorithms have been trained and perfected to do that specific task.
Dreaming about Human-like Robots
But we wanted to take a different approach. We wanted to bring together our own learning process: how we are curious, ask questions and learn new things every day into making intelligent Robots.
We listed some of the things that we remember and experienced since birth that we wanted to embed into Robots. These are:
We slept a lot
We had a very limited vocabulary
We learned about new words and things because they were repeated to us
We slowly learned to related objects and their names
We were able to give short answers to simple questions
We were constantly encouraged and appreciated when we did the right thing
We were corrected when we did the wrong thing
We asked lots of questions
Our questions were answered
We developed our likes and dislikes
We started learning on our own
We are able to handle different situations and people
We developed the confidence that we could pursue our interests
And this way we ended up creating a road map of the features that we would like our intelligent robot to have. This was a good start.
Why building Human-like Robots is difficult?
The list of features changed our views of both humans and robots. We gained more insight and appreciation of the ways humans learn new things. We realized learning is a combination of several things, including seeing things, hearing them, smelling them, touching them, repetition, drawing logical conclusions, doing estimation, getting feedback, and trying hard and not giving up. Most significantly all this happens over the years and learning is continuous and never ends.
In comparison, we expect robots to do a lot of things – expect them to have superhuman capabilities. But in return, we give them too few things to make that happen, and we expect everything to happen fast. This was our prime lesson and we hoped to remember this lesson while making our robot.
We had to think deeper and be more honest to trace our own learning journey. We discussed a lot with each other on how we have been able to learn new things every day and develop skills over time. How we can have shared interests (in space and robotics) and also our unique likes and dislikes in terms of food, places, and music. What makes us happy, make us work hard, and pursue our passion?
Our approach to building Human-Like Robots
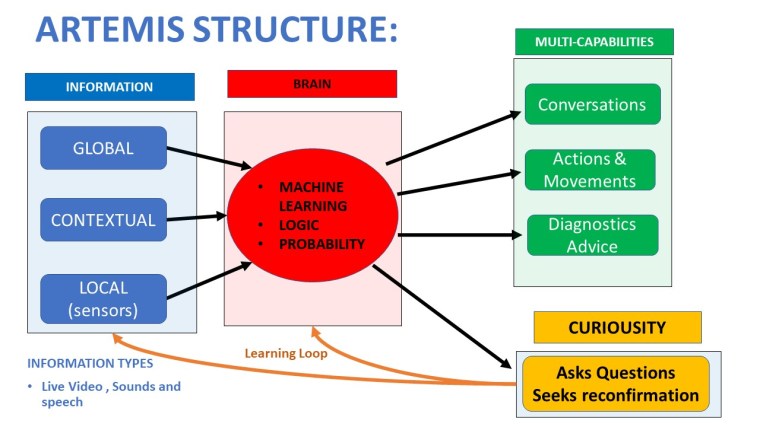
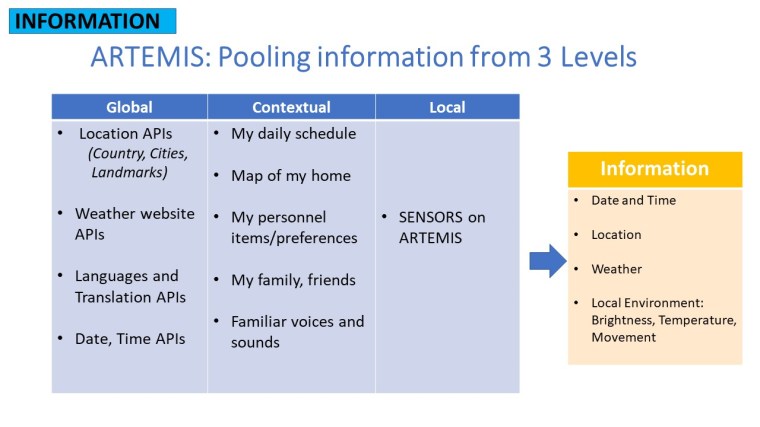
From our discussions, it became very clear to us that our multiple senses, our curiosity, and an enabling learning environment and opportunities are very important for the learning process. So how can we replicate the same features and processes in robotics?
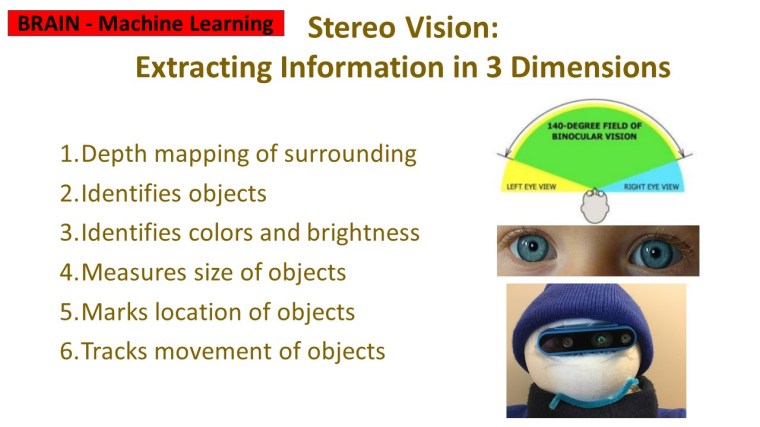
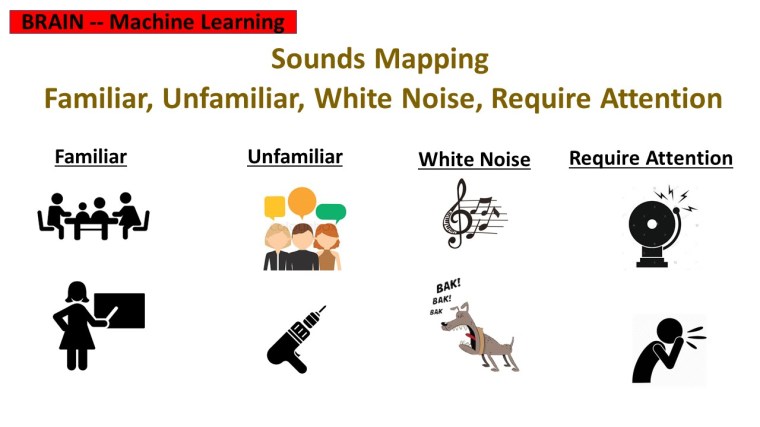
Our multiple senses (eyes, ears, nose, mouth, skin) allows us to experience the world in multiple dimensions. For instance, not only we know what a dog looks like, but we also know how it sounds like, and even the smell of it. By only hearing the dog bark, we can recreate what animal it would be.
We can combine information obtained from senses with our experiences to recreate even more predictive models. For instance, we have memories of what our food smells like, and if we come across that smell in our house we can deduce, say our parents are cooking that food, it must be getting closer to food time, and we may need to end up our playtime to go to the dinner table.
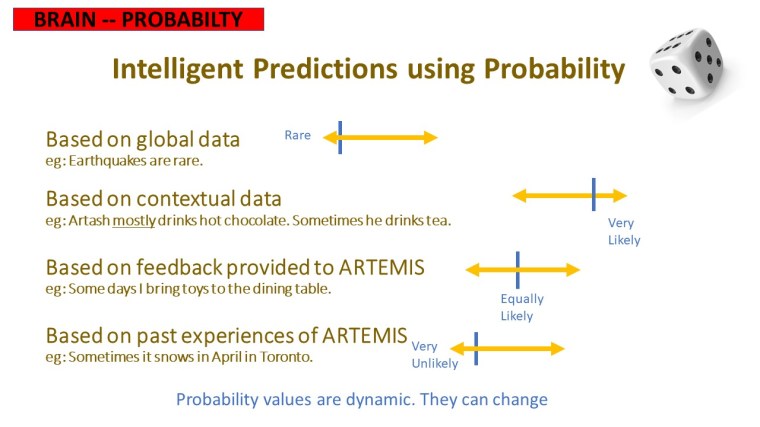
And we can then draw upon our intuition and logic to make yet more powerful predictions. For instance, if we got our school reports card that day, we can be pretty sure based on our several years of experiences that some of the conversations on the dinner table with our parents would be around the report card and if we are happy with our results.
These lived experiences, multiple senses, use of deductions, logic, and probability make us more intelligent and have to be a part of any human-like robots that we build.
Introducing ARTEMIS
All our dreaming, thinking, planning, conversations, making, programming, and training led to the creation of the ARTEMIS Robot: a small step in the world of robotics but definitively a big step for us in having some of our dreams turn to practice.
ARTEMIS stands for Artificially intelligent Real-time Training by Environment, Mapping, Immersion, and Sounds.
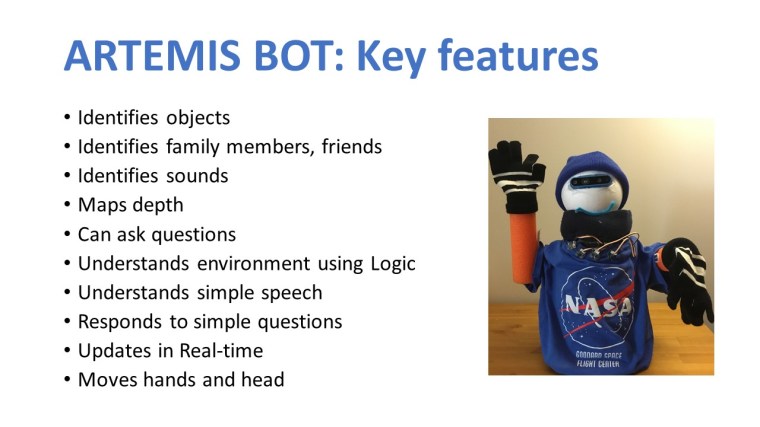
ARTEMIS is how we envision a human-like robot should be like. A robot that:
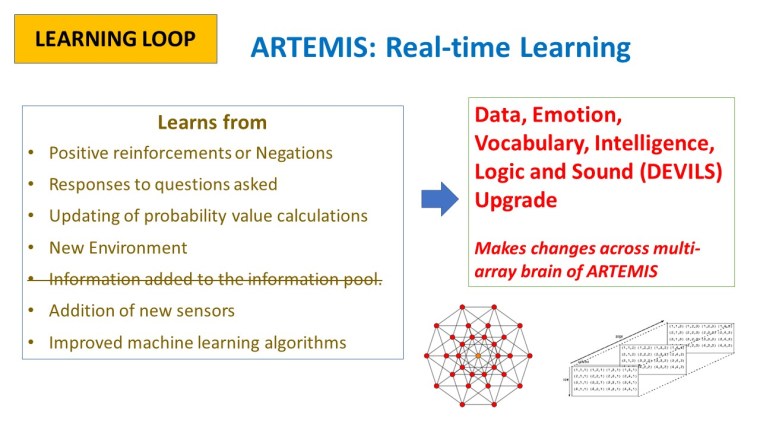
Learns slowly
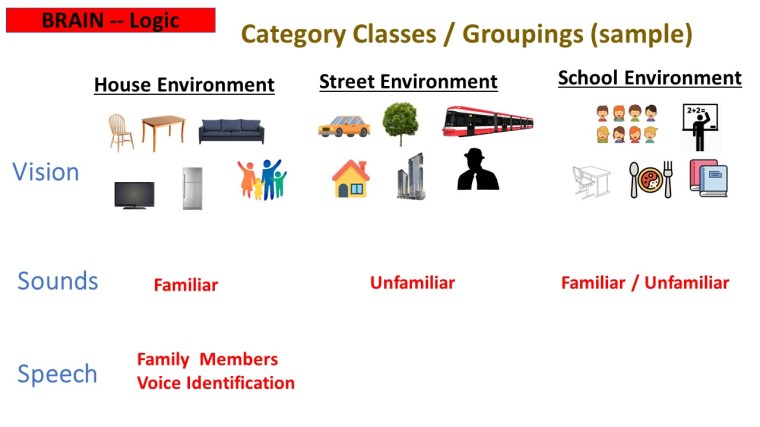
Learns through multiple senses (sight, sounds, speech)
Learns through its environment
Learns by mapping objects, faces, conversations, actions around it
Learns by being immersed in conversations with humans
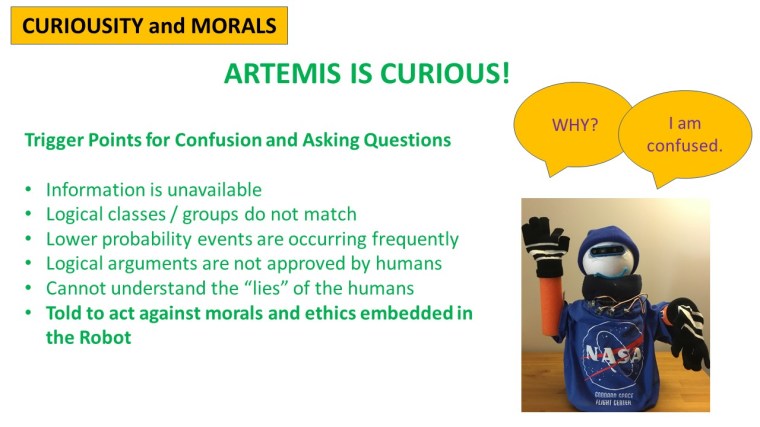
Learns by asking questions
Learns through encouragement and reinforcement of learning
Learns through applying logic
Learns through using probability/ making estimation
Learns constantly
Has multiple capabilities
Can be whatever it wants to be
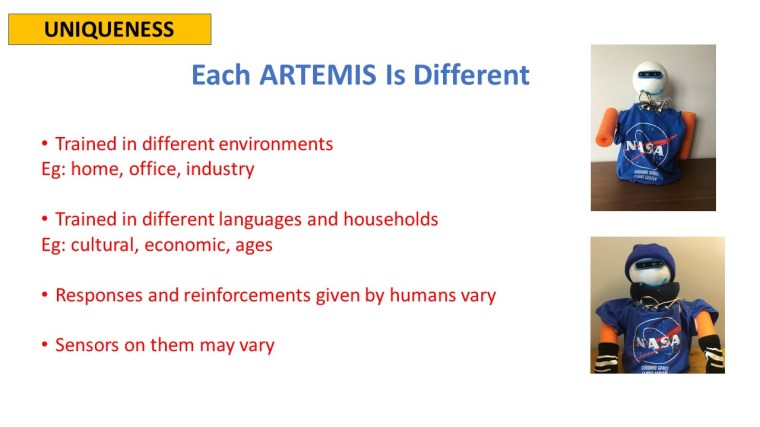
Is unique
Has moral and ethical values
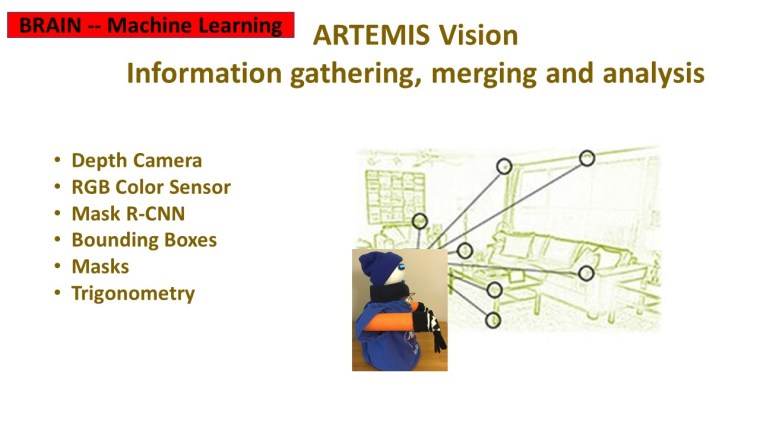
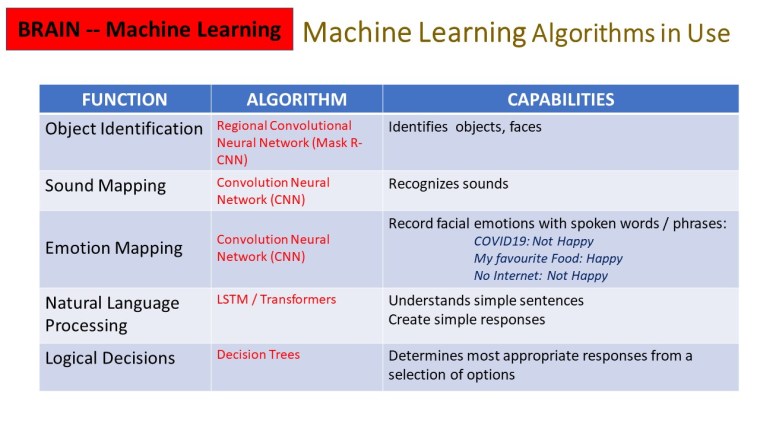
Arushi was the lead in developing the Robot and building its multitasking capabilities. Artash was the lead in developing the machine learning algorithm and the mathematics (probability, trigonometry, and boolean logic) behind it.
Together they combined their knowledge and experience into building ARTEMIS.
Hope you enjoy the presentation below.
A complete video presentation, the code, the A100 Logic Array and the DEVILS Upgrades used in the ARTEMIS Bot will become available soon.
Want us to give a demo of ARTEMIS Bot at your organisation, event or conference, write to us at: artash.nath@gmail.com or at www.twitter.com/wonrobot
Want us to give a demo of ARTEMIS Bot at your organisation, event or conference, write to us at: artash.nath@gmail.com or at www.twitter.com/wonrobot
2026 Third Place, Student Oral Competition, NASA Exploration Science Forum, USA. 2025 Third Grand Award, International Science and Engineering Fair, USA. NASA Group Achievement Award 2025 (DART mission team). 2024 Youth Can Innovate Award ($7,000) and Silver Medal, Canada-Wide Science Fair. Gloria Barron Prize for Young Heroes 2024. Eureka Changemakers Fellow 2025. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.
Follow Us on Twitter
Do it Yourself Asteroid Astrometry using Python for Asteroid Apophis
The Masked Scales; 2020 NASA SpaceApps COVID-19 Challenge Global Winners!
Deep Space Musical: NASA SpaceApps 2018 Toronto Winner
LIGO Quadruple Pendulum: Swinging to Stability, Royal Astronomical Society of Canada 2019
TVO Kids (2018): TRAPPIST-1 Sound and Light Model
Lecture on TRAPPIST-1 at Carr Astronomical Observatory (CAO) Open House
Yes I Can / Oui Je Peux: NASA – Canadian SpaceApps Toronto 2017 Winner
Drop the Drought : NASA Space Apps Toronto 2017 Winner