Space exploration and rockets go together. As humans dare to dream to explore Moon (once again), Mars and beyond, and deep space we need to create bigger and powerful rockets […]
Space exploration and rockets go together. As humans dare to dream to explore Moon (once again), Mars and beyond, and deep space we need to create bigger and powerful rockets that are safe, reusable and intelligent.
Arushi configuring the 2 servo gimbaled system so that the rocket can stay vertical during powered flight
As with all complex projects, the important thing is to break them into simpler parts and work on them modularly. Anyone can contribute to building rockets by providing expertise, sharing lessons from their own experiments in making them, or simply by becoming aware of how rockets work and why we need to build them. An informed society that appreciates the contribution rockets and space exploration can make in igniting dreams and aspirations of younger generation benefits all. It creates a new generation of enthusiastic engineers, researchers, scientists, astronauts, doctors, and teachers working toward a common goal.
Space exploration is an intergenerational and perpetual task. To become a multi-planetary species, it is important to set our vision and goals high so that every generation remains inspired and motivated to achieve further.
We have been building and flying model rockets for the last 2 years on our own and through different rocketry clubs. Building model rockets is a complex yet fun-task as it brings together different skill sets including designing, measuring, making, electronics, programming, propulsion, communication, parachutes, data analysis, weather prediction, and safety.
Model rockets have 3 key parts: (1) Rocket Structure, (2) Motor (which provides the thrust), and (3) Parachutes (to bring the structure down safely). To fly them we need a launch pad and an ignition control to fire the motor.
This is the basic minimum and it is fun to see the rockets soar high and the motors ejecting the parachute and the whole structure coming down gracefully (mostly!). One can never tire of flying model rockets as each one is different from the other.
After becoming familiar with the basics, one can start experimenting to make rockets more intelligent. Example one could add a camera to take video or sensors to collect data. See for instance the clip below from a video camera affixed to our rocket.
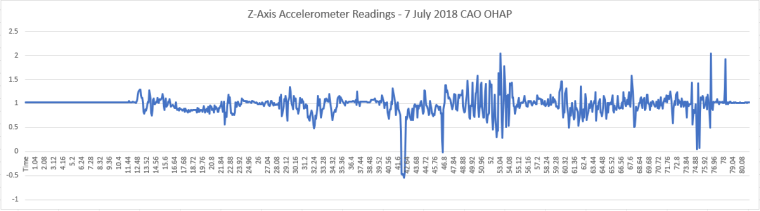
Adding sensors to rockets are equally fun. It can capture data including acceleration, maximum height attained, total flight time, powered flight time and more. These sensors could be affixed to micro-controllers such as Micro:bit which would even transmit the data real time to the base station. This kind of telemetry data from the rocket is very helpful to improve rocket performance.
All model rockets are dependent on wind speed and direction. The rockets are flown into the wind to keep the drift of rockets and the parachutes to the minimum. Else the chances are that will land too far and get lost.
We wanted to make our rockets more autonomous – so that they are not fully dependent on wind but can make corrections to keep their flight path vertical. This means turning to one of the four key ways to doing it (movable fins, gimbaled thrust, vernier rocket, thrust vane). We opted for gimbaled thrust as it was not the simplest and not the most complex too, and was something we could create using Arduino and sensors we were familiar with.
Examples of Flight Control in a Rocket.
Gimbaled thrust meant changing the orientation of the motor in flight to ensure the rocket structure (Z-axis) remains vertical. This could be done by programming 2 servos to turn the sleeve to which motor is affixed to move in a rocket stabilising direction in X-Y plane. The data for it can be gathered through accelerometer and gyroscope.
Our previous versions of rockets used Micro:bit (very successfully)
Earlier we used the accelerometer and radio communication function of a Micro:bit to provide us with live radio telemetry. Micro:bit proved to be very sturdy and robust and they could take several falls when the rocket parachute failed to deploy properly for a smooth descent. However, it lacks a gyroscope and its radio transmission range is limited (around 400 metres) even in open space. This makes them unsuitable for the functions we wanted the rockets to perform.
So we decided to upgrade by using dedicated accelerometer cum gyroscope, and radio transmitters.
2026 Third Place, Student Oral Competition, NASA Exploration Science Forum, USA. 2025 Third Grand Award, International Science and Engineering Fair, USA. NASA Group Achievement Award 2025 (DART mission team). 2024 Youth Can Innovate Award ($7,000) and Silver Medal, Canada-Wide Science Fair. Gloria Barron Prize for Young Heroes 2024. Eureka Changemakers Fellow 2025. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.
Follow Us on Twitter
Do it Yourself Asteroid Astrometry using Python for Asteroid Apophis
The Masked Scales; 2020 NASA SpaceApps COVID-19 Challenge Global Winners!
Deep Space Musical: NASA SpaceApps 2018 Toronto Winner
LIGO Quadruple Pendulum: Swinging to Stability, Royal Astronomical Society of Canada 2019
TVO Kids (2018): TRAPPIST-1 Sound and Light Model
Lecture on TRAPPIST-1 at Carr Astronomical Observatory (CAO) Open House
Yes I Can / Oui Je Peux: NASA – Canadian SpaceApps Toronto 2017 Winner
Drop the Drought : NASA Space Apps Toronto 2017 Winner



 We have been
We have been