Arushi Nath. Grade 8 Student. The Bio Summit is a global community of Do-It-Yourself biologists, biohackers, biomakers and members of community laboratories. It has been coming together annually since 2017 […]
Arushi Nath. Grade 8 Student.
The Bio Summit is a global community of Do-It-Yourself biologists, biohackers, biomakers and members of community laboratories. It has been coming together annually since 2017 to share, discuss, collaborate and frame the future of independent research in the life sciences. This year, the 6th Global Community Bio Summit was held as a hybrid event, with most programming delivered virtually from January 26-29, 2023.
It was my first time participating in this event. I learned about this community while watching online videos on the genetic rescue of endangered species for biodiversity conservation. As I have been working on biodiversity-related projects and am interested in neurotech and hacking, I decided to register for this event in November 2022. As the participants were encouraged to share their ongoing projects, I submitted an abstract of my ongoing project related to bio-mimicking the neuron architecture of a dragonfly to build a drone.
I was delighted when in early January 2023, I received a confirmation that my registration and abstract were approved. I was given a 20 minutes slot to make an oral presentation of my project to the broader bio summit audience on 28 January 2023. My presentation would be under the “Open Innovation: Science and Automation Track” of the Biosummit.
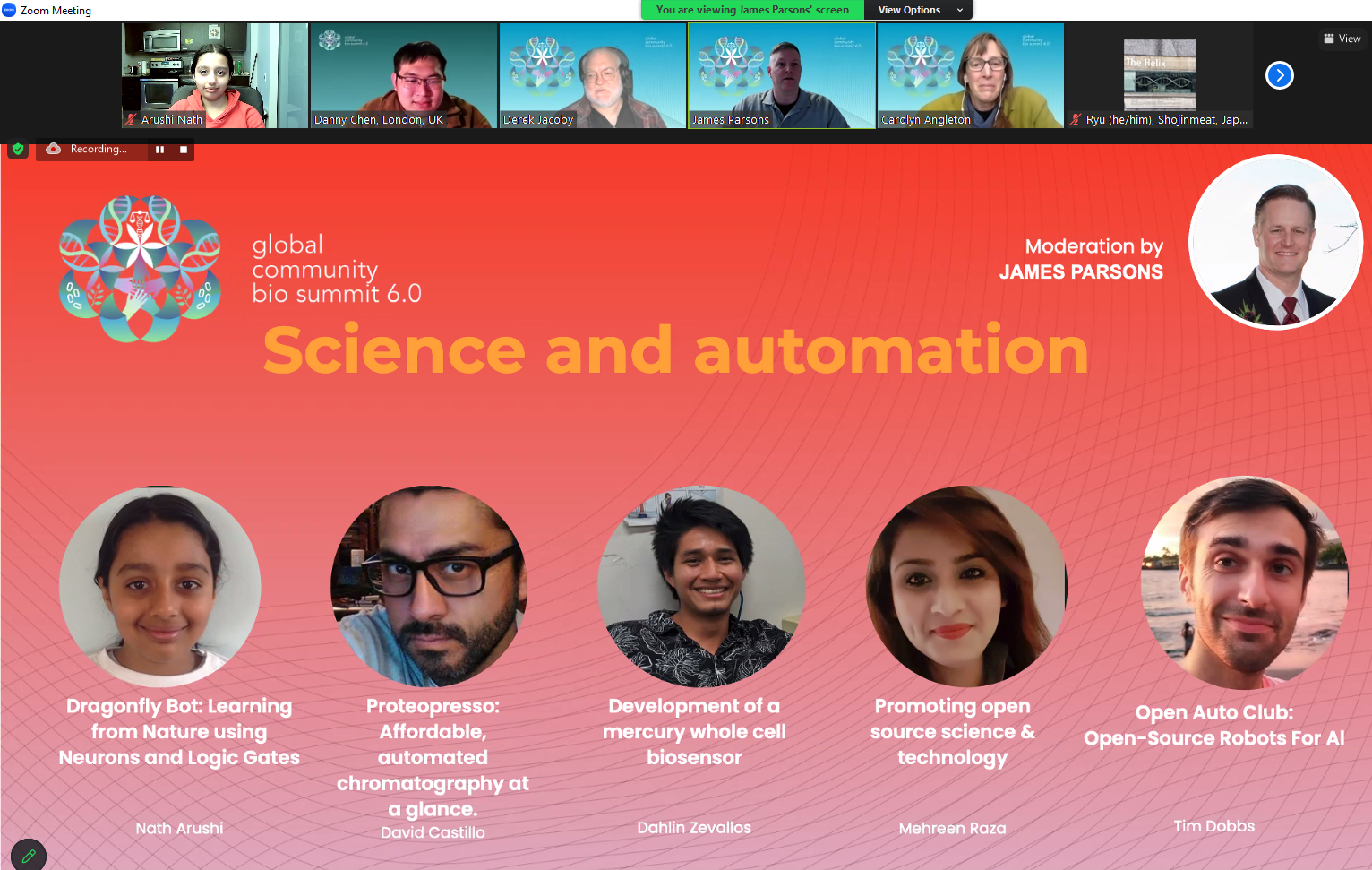
Open Innovation: Science and Automation Track
This track happened on 28 January 2023 at 4.50 pm EST on Day 2 of the Summit. Day 2 focused on Open Innovation, Learning & Education, Environmental Stewardship, Responding to Global Health Challenges, and Workshops.
The Science and Automation track was moderated by James Parsons. The other speakers in my track were: David Castillo on Proteopresso: Affordable, automated chromatography at a glance, Dahlin Zevallos on Development of a mercury whole-cell biosensor, Mehreen Raza on Promoting open source science & technology, and Tim Dobbs onOpen Auto Club: Open-Source Robots For Al
It was interesting to hear so many fascinating presentations about projects people undertook in their countries with support from the community. I learned how people used 3D printers to print lab equipment to assist with Pelvic Surgery, how to perform chromatography, and so much more.
Dragonfly Drone: Learning from Nature using Neurons and Logic Gates
My presentation went well. There were over 30 participants in my track. It is always fun to share ongoing projects with others to get their feedback and answer questions they have.
Who is the best hunter in nature? It is, surprisingly, a dragonfly. A dragonfly has more than a 97% chance of catching its prey, while lions have only a 25% chance and sharks 50%. It is because a dragonfly has
only 16 visual neurons. The small number of neurons ensures that information can travel fast, making the dragonfly quick in making decisions. When the dragonfly sees prey in front of it, it first estimates its size to ensure it is not a predator. It then silently follows it and waits for the right time to capture it. Finally, it sends signals to its wings to fly, which allows it to swoop upon the prey. Over six months, I used the neuron architecture of the dragonfly to create my Dragonfly Drone as an open-source project. I built several prototypes of my Drone using aluminum cans, water bottles, and Lego. I experimented with different sensors and cameras, motors and servos, and used Python and Arduino as the programming languages. My final design uses a camera to identify the prey, an ultrasonic sensor to estimate the distance of the prey, and digital logic gates to replicate the functioning of neurons.
Video Demonstration of the Dragonfly Drone
An Arduino microcontroller provides decision-making support, and servo motors were used to replicate the functions of its wings.
The Dragonfly Drone had five features:
1. Detection of prey
2. Getting the distance to the prey
3. Deciding to fly or not to fly
4. Which direction to fly, and finally
5. Which direction to turn the motors to determine the best flight path
Python programming was used to process data from the camera and sensors, and digital logic gates. Arduino was used for controlling the movements. I am now using the learnings from this project for my other neurotech projects.
I am currently working on measuring electrical activity in the human brain, particularly neural oscillations, using an open-source biosignals platform to help stimulate patients’ memories with Alzheimer’s disease. This project was initiated during the Brain Hack Toronto 2022. More details about this project are available at: BrainHack Toronto 2022: Neural Oscillations, Flickering Lights and Open-source Biosignals
2025 Third Grand Award, International Science and Engineering Fair, USA. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.