Arushi (7 years), Artash (11 years) and Vikas Nath It all started with the NASA Space Apps Challenge held in Toronto from April 28 – 30, 2017. I and my […]
Arushi (7 years), Artash (11 years) and Vikas Nath
Canadian Astronaut Jeremy Hansen speaking at the NASA Space Apps Challenge, Toronto on 28 April 2017
It all started with the NASA Space Apps Challenge held in Toronto from April 28 – 30, 2017. I and my brother Artash along with our dad – Vikas have been participating in the NASA Space Apps Challenge for the last 4 years – reaching among the global top 5 in 2014.
This year the Canadian Astronaut, Jeremy Hansen was also present. In his talk on space technologies and exploration, he mentioned, “If we lose access to space for 10 minutes, we will have a big problem”. These words made me think. What kind of problems will we have?
Arushi, Artash and Vikas in conversation with the Canadian Astronaut Jeremy Hansen
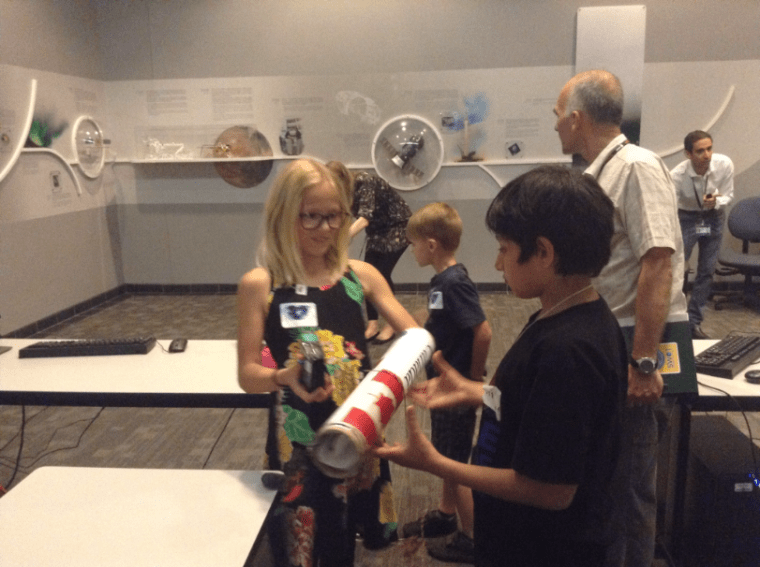
So we sat down with Jeremy Hansen to learn more about space projects and technologies that would be useful for astronauts. He advised us to keep working on science, technology, and engineering projects. We took this opportunity to show him our home-built model of Canadarm. This was funny as he is well trained in using the real Canadarm! We were inspired and motivated after talking to Jeremy, and we hoped to see him again.
At the NASA Space Apps Challenge, teams are presented with various space-related problems to chose from. They have to come up with a solution within 48 hours and present it to the judges. I had a lot of space related ideas in my mind. I decided to tackle the “Design your own challenge using RadarSat-2 satellite data” under the Canadian segment of the Space Apps Challenge. I like space, I like robots and I like drawing. I thought of an idea that would use images from the Canadian satellite RadarSat-2 in a scientific and artistic manner to celebrate Space, Canadian icons and Canada 150 years. This was the beginning of “Yes I Can” / “Oui Je Peux” project!
My brother decided on a different project – “Drop the Drought” under the NASA Space Apps Challenge “Our Planet, Our Home” to predict droughts and migration patterns using NASA’s Landsat and Terra Modis satellites data.
Arushi and Artash getting ready to present their respective projects at the NASA Space Apps Toronto 2017.
Over 2 days I and my brother worked hard on our projects supported by our dad – Vikas. I went to the Toronto Reference Library to get large printouts of the RadarSat-2 images. I cut those images in small pieces, photographed them, rearranged them using a mosaic making software, and modified them to create different shapes.
Below are some of the shapes I made using the RadarSat-2 images. They were of things that will stop working if we lose access to space for a few minutes, namely Global Positioning System (GPS) and mobile phones. Other shapes that I made were the Canada flag, the Canada Map and the Canada @ 150 years logo.
Award-winning Mosaics by “Yes I Can” made from RadarSat-2 images
On 30th April 2017, I presented my project to the judges and the audience. The judges asked several questions -how did I manage to find all the colors from RadarSat-2 and what I planned to do next? I answered all the questions and waited for the results of the Space Apps Challenge Toronto. Artash presented his presented “Drop the Drought” too on the same day. In his presentation, he showed the audience a simulation video he had made to predict droughts in the Kenya-Uganda border using satellite data.
Arushi presenting her project “Yes I Can” which won the Canadian Space Apps Challenge Toronto 2017
Artash presenting his project “Drop the Drought” which won the NASA Space Apps Toronto 2017
I was pleased to learn that my project “Yes I Can” was one of the winners of the Canadian segment of the Space Apps Challenge Toronto. My brother’s project “Drop the Drought” was one of the winners of the NASA Space Apps Challenge Toronto.
Artash and Arushi with other Canadian Space Apps Toronto Winners
Arushi holding a mosaic of “Canada @ 150 logo” made using RadarSat-2 images
A few weeks later, after coming back from school, I learnt from the Canadian Space Agency that “Yes I Can” had won the national round of Canadian Space Apps Challenge 2017. And the winners were invited to make a presentation at the Canadian Space Agency headquarters at Saint-Hubert, Quebec on 4th July 2017. This was a very special day. On the same day, the two new Canadian astronauts would be welcomed at the Canadian Space Agency and their achievements celebrated. We were very excited about this opportunity to visit the Canadian Space Agency, to present our project, and meet the new astronauts.
On 3rd July 2017, we found ourselves on the train to Montreal on our way to Canadian Space Agency headquarters. Our much-loved model of Canadarm came with us.
In train with Canadarm heading to the Canadian Space Agency in Saint-Hubert, Quebec
The Canadian Space Agency headquarters is known as the John H. Chapman Space Centre. It houses the Canadian astronaut office and provides technical, scientific and administrative support to Canada’s space sciences and technology program.
In front of the John H. Chapman Space Center, Canadian Space Agency Headquarters
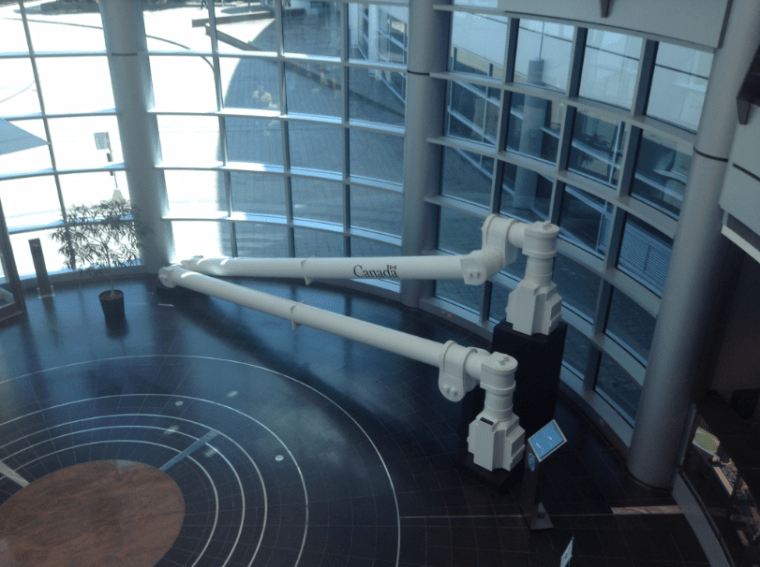
The big day – 4th July 2017 had arrived. We arrived early at the Canadian Space Agency and entered through the main rotunda. We were immediately greeted by a far bigger model of the Canadarm. Finally, one Canadarm met the other! There were satellites and other space artifacts hanging in the rotunda. It felt nice to be surrounded by icons of Canada’s achievements in the space sector.
It was a busy day at the Canadian Space Agency as staff members and their families were also present to greet the new astronauts. There was a buzz in the air and we were happy to be in the midst of it.
Model of Canadarm at the Main Rotunda, Canadian Space Agency
Soon we met Andrea Matte, Senior Communications Advisor, and Nathalie Levesque, Coordinator, Access to Information and Open data at the Canadian Space Agency. We had met them earlier at SpaceApps Toronto and it was good seeing them again. They had worked incredibly hard to make this visit possible for the Space Apps winners and would be accompanying us throughout the day. Soon we got our VIP passes and were whisked to the conference room where the new Canadian Astronauts would be welcomed. A section in the front was reserved for the Space Apps winners!
We were pleasantly surprised when the Canadian astronaut Jeremy Hansen recognized us and came to meet us. He welcomed us to the Canadian Space Agency and congratulated us on “Yes I Can” winning the Space Apps Challenge. He was well informed about our project. He introduced us to his family and explained our “Yes I Can” project to his children. We talked to his children and they were excited to operate the model of the Canadarm we were carrying.
Meeting Astronaut Jeremy Hansen at the Canadian Space AgencyTalking with other Astronaut families
We met several more people in the conference room. They were interested in viewing our mosaics created using RadarSat-2 imagery and congratulated us on our win.
Explaining our “Yes I Can” project in the conference room. Many people came and congratulated us!
Soon enough Hon. Navdeep Bains, Minister of Innovation, Science and Economic Development, and Sylvain Laporte, President of Canadian Space Agency came on the stage. Minister Bains briefed everyone about the Astronaut application and selection process. We found out that 3,772 applications from Canadians in every province and territory, as well as outside Canada applied. And after a one-year arduous selection process, just two candidates were selected to represent Canada’s new generation of space explorers.
Announcing and welcoming the new Astronauts at the Canadian Space Agency. Minister Navdeep Bains, Astronaut Jennifer Sidey, Astronaut Joshua Kutryk, Astronaut Jeremy Hansen and Sylvain Laporte, President of Canadian Space Agency
And then the moment we were waiting for arrived. They announced the names of 2 new astronauts – Jennifer Sidey and Joshua Kutryk and welcomed them to the Canadian Space Agency. There was a big applause which went on for several minutes. Astronaut Joshua mentioned that this was his first job where the entire staff and their families gathered to welcomed the new recruits to the organization. It was a good beginning.
Listening to Peri Peri team from Ottawa about their project that used RadarSat Constellation Mission (RCM) data
We had a packed schedule in front of us. It was time for the Canadian Space Apps winners to make their presentations. The first presentation was by the Peri Peri team from Ottawa. They presented about their user-friendly interface to access and display modeled RadarSat Constellation Mission (RCM) data.
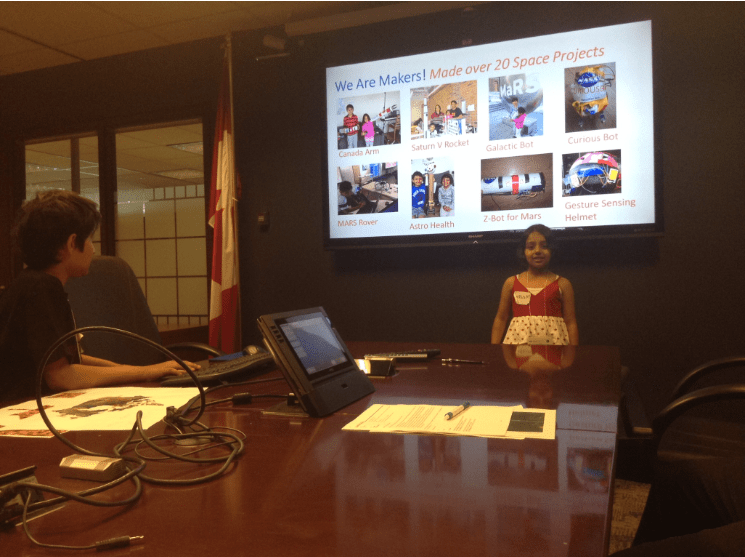
Ready to present “Yes I Can” Project at the Canadian Space Agency
Then, it was our turn to present our project “Yes I Can”. Nathalie introduced us to the audience. I was very confident and excited to make my presentation as I had worked hard for it. We had come prepared with large printouts of mosaics created by us of Canada Flag, Canada Map, and Canada 150 logo.
Arushi presenting “Yes I Can” Project at the Canadian Space Agency
In my presentation, I briefed the audience about my interests in space, arts, and robots, as well as the inspiration behind my project. I explained the process of processing RadarSat-2 images and how we used photographs and mosaic software in our project. Artash helped me during the presentation and in displaying the mosaics made from the RadarSat-2 images.
After the presentation, people were curious to know how I got this idea? They had seen the RadarSat-2 data used in several ways but it was the first time they saw it being used in an artistic manner to create mosaics representing Canada. I explained the process to them in detail and how we managed to get all the colors needed to create the mosaics. We got a big applause and words of encouragement from everyone.
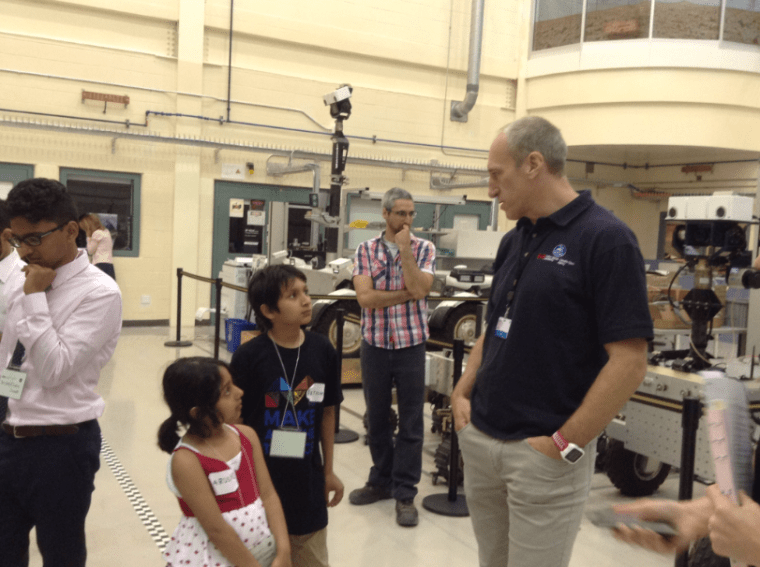
Once the presentations were over, it was time for the VIP tour of the Canadian Space Agency. Our first stop was the room where they keep, repair and test all their Rovers. It was a very large room with lots of equipment on the floor and hanging from the roof.
There we met Martin Picard who worked as Senior Engineer (Robotics) at the Canadian Space Agency. We learned about the different fleet of rovers at the Canadian Space Agency and how they are tested under different conditions. It was interesting to note that all the Canadian astronauts have to learn driving robots on different terrains as this skill could prove handy for future space exploration missions.
Talking about the fleets of rovers with Martin Picard (Senior Engineer- Robotics) at the Canadian Space Agency
There were lots of different-sized rovers, wheels, tools and spare parts. Some of the rovers could be controlled using R/C remote while others were autonomously driven based on camera and sensors. It reminded us of home and the Kennedy Space Centre at the same time!
The Mars Exploration Science Rover (MESR)
Interestingly, some of the Rovers were for Lunar exploration while others were for Mars rock sampling. This was exciting and gave us confidence that Canada would have a role to play whenever a human mission to Mars takes place. We loved seeing so many Rovers and our imagination was transported to these Rovers exploring distant planetary bodies.
Different wheels for different rovers
The bigger Rover was the MESR – the Mars Exploration Science Rover. It was a six-wheeled rover with a robotic arm equipped with a microscope and mini-corer to drill into rocks and perform analysis of rocks using its high definition microscope instrument – very similar to Curiosity Rover on Mars.
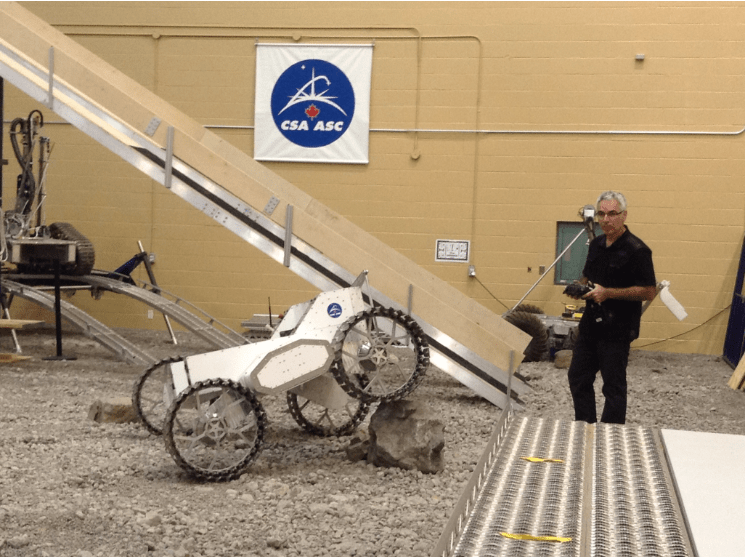
The (Lunar Rover Platform and Drivetrain Prototype) LRPDP rover – capable of tackling large obstacles
On the side of the room, there was a big rock pit. It was the test bed to simulate driving conditions for Rovers during planetary exploration and check their capabilities. There was a big slope at the corner of the rock pit to test if the robots could go down without falling off. This would be a very useful capability for Rovers when exploring craters and rims. We were particularly interested in the wheels of these Rovers and how they were engineered to climb rocks. We asked questions about the material used for building them and the engineering challenges faced – as we knew the wheels of the NASA Curiosity Rover had started to show some damage after 5 years of Mars Exploration.
Demonstrating our Canadarm!
We asked questions to Martin about computing languages used to program the rovers. We learned that they develop their own languages to program these rovers. We were allowed to go in the rock pit to have a closer look at the Lunar Rover Platform and Drivetrain Prototype (LRPDP) rover. We discovered that the LRPDP has small spaces in between the panels of the wheels which allowed it to climb rocks.
In front of the Lunar Rover – LRPDP
We then went upstairs where there was a life size model of the Canadarm2. It was unbelievable as it was huge! We had seen so many pictures of the Canadarm so far. But standing next to the life size model which was 17 meters long made us look so small. This was that piece of engineering which constructed the International Space Station, positioned the Hubble Space Telescope, and captured spacecrafts ferrying cargo to the International Space Station. Canada built the Canadarm and Canadarm built the International Space Station and it made all the scientific experiments possible.
We were greeted by Mathieu Caron, Supervisor, Mission Control at the Canadian Space Agency. Mathieu gave us a tour and very detailed briefing of different sections of the Canadarm2.
Mathieu Caron, Supervisor, Mission Control explaining about the different versions of the Canadarm
We were surprised to learn that Canadarm2 is not a fixed structure. Instead, it can be moved anywhere there is a Power Data Grapple Fixture (PDGF) on the International Space Station. PDGF provides power and communication lines to the Canadarm and makes it possible to reach any section of the International Space Station. The Latching End Effectors (LEEs) at each end of the arm provide power, data, and video signals to the arm when connected to the PDGF.
Mathieu Caron, Supervisor, Mission Control explaining about the Power Data Grappling Fixture (PDGF) that allows Canadarm2 to be moved to different sections of the International Space Station
We learned about different instruments on the Canadarm and what they are used for. For instance, Dextre is a robot with two smaller arms that can be attached to the end of the Canadarm and placed in position for the work it needs to do, including capturing spacecrafts. Dextre is operated remotely from inside the Space Station. Mounted cameras allow astronauts to remain inside the Station for tasks that previously would have required a space walk.
Dextre – a robot with two smaller arms that can be placed at the end of Canadarm2
It was very gracious of Gilles F. Leclerc, Director General, Space Exploration at the Canadian Space Agency to drop in during the tour and welcome us personally to the Canadian Space Agency. We had previously exchanged messages with him about our space projects.
With Gilles F. Leclerc, Director General, Space Exploration, Canadian Space Agency
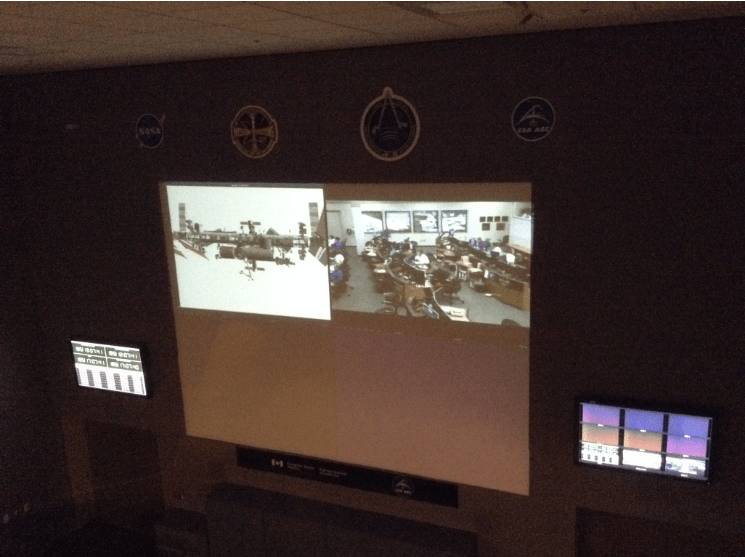
After viewing the Canadarm, we moved to the Control Centre from where the Canadarm2 is controlled. The room was filled with small and big screens. And on the big screen, we could see the International Space Station and the Mission Control Centre at Houston, Texas.
Control Centre from where Canadarm is monitored and controlled
There we met Ed Birchnall, Robotics Training Lead for Astronauts / Mission Controller, a Canadarm expert. All the astronauts who control the Canadarm2 are trained by him.
We learned that the role of Canada was no longer limited to making the Canadarm2. Instead, the Canadian Space Agency is taking greater control of the Canadarm2 from Houston. Canadian mission controllers are part of the NASA/Canadian Space Agency team responsible for Canadarm2 and Dextre operations and they work from mission control center at the Johnson Space Center in Houston, Texas as well as from the Canadian Space Agency in Saint-Hubert, Quebec.
During robotic operations, three mission controllers are on duty and share the work. Surprisingly commands to the International Space Station are not sent directly from the Canadian Space Agency. Instead, they are first sent to Houston and then Houston relays them to the International Space Station.
With Ed Birchnall, Robotics Training Lead for Astronauts / Mission Controller, Canadian Space Agency
Ed also mentioned that Canadarm2 has taken up new tasks which were not originally envisaged. For instance, capturing spacecrafts sent by private companies. The Dragon resupply capsule cannot dock on its own with the space station. It matches the heading and speed of the space station, comes within ten meters of the station, and the Canadarm2 is then used to grab the capsule.
Canadarm2 Simulator – Astronauts use it to practice capturing space capsules and assisting in spacewalks by looking at the camera screens
I asked him how many joints does it have. He responded that the Canadarm has six joints that correspond roughly to the joints of the human arm, with shoulder yaw and pitch joints, an elbow pitch joint, and wrist pitch, yaw, and roll joints. He explained about the different cameras placed on the Canadarm and how astronauts and ground staff can control the Canadarm2 based on the view from the different cameras. He mentioned that more and more tasks related to Canadarm2 could now be controlled from the ground freeing up more time for Astronauts to conduct scientific experiments.
View of the International Space Station and Control Room at Houston from the Canadian Space Agency
We thanked Ed and then headed to the Cafeteria at the Canadian Space Agency for our lunch. It was burgers, fries, hot dog and juice and an opportunity to rub shoulders with people behind the Canadian space sector.
Lunch at the Canadian Space Agency Cafeteria – an amazing place to meet and talk to people behind the Canadian space sectorMeeting the new Canadian Astronaut Joshua Kutryk – he has flown 25 aircraft types. Would Space Launch System be the next?
We met Astronaut Joshua Kutryk who recognized us immediately because of the photograph of our Canada Arm he had seen on social media. He congratulated us on our winning the Canadian Space Apps challenge and gave a high-five to all of us! Joshua is a test pilot, engineer, and lieutenant-colonel in the Royal Canadian Air Force. He has flown more than 25 aircraft types.
With the new Canadian Astronaut Jennifer Sidey – she mentioned that she loved fire and ended up with an advanced degree in Combustion.
We met Astronaut Jennifer Sidey. Astronaut Jenni is a mechanical engineer and has a Ph.D. in engineering with a focus on combustion. This was evident as soon as we met her and she saw our model of Canada Arm. She recognized us and her first question was how does our Canada Arm work? We explained its working to her. Being a true engineer she wanted to see it in action and she tested it on a tree and was able to pick a leaf using our Canada Arm. We asked her about her research interest in combustion. She promptly responded that she liked fire a lot and hence her advanced degree was related to combustion.
Watching the presentation by JAM team from Waterloo about their project – Decoding the secrets of the Alouette
We then headed back to the conference room to watch the winning team from Waterloo present their project” JAM – Decoding the secrets of the Alouette”. We found the way the interpreted the ionograms from the Alouette data really interesting. They found one main dot on the ionogram, the dot telling the name of the satellite. Based on that they could interpret the other dots and their meanings.
With Robert Saint-Jean, Senior Program Scientist (Earth Observation), Canadian Space Agency
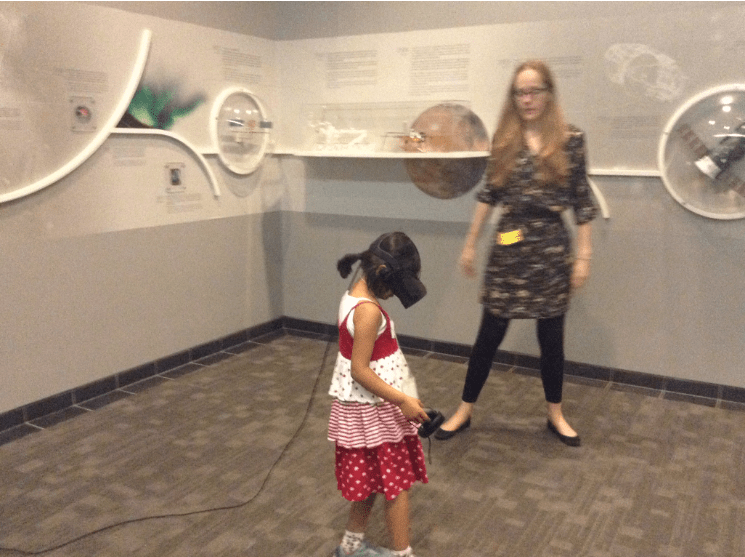
Towards the end of the tour, we went to the Virtual Reality exhibition accompanied by Robert Saint-Jean – Senior Program Scientist (Earth Observation) at the Canadian Space Agency. On the way, he explained to us about the use of satellite data to monitor land and water resources on Earth, and how the Canadian Space Agency is collaborating with the National Aeronautics and Space Administration (NASA) on various scientific missions.
We grabbed the Virtual Reality headsets and were transported inside the International Space Station. There we could perform a lot of activities, including grabbing things that were floating around and transporting them to different sections. We were able to navigate around by grabbing the walls of the international space station and pushing ourselves away.
Navigating the International Space Station using the Virtual Reality Headsets
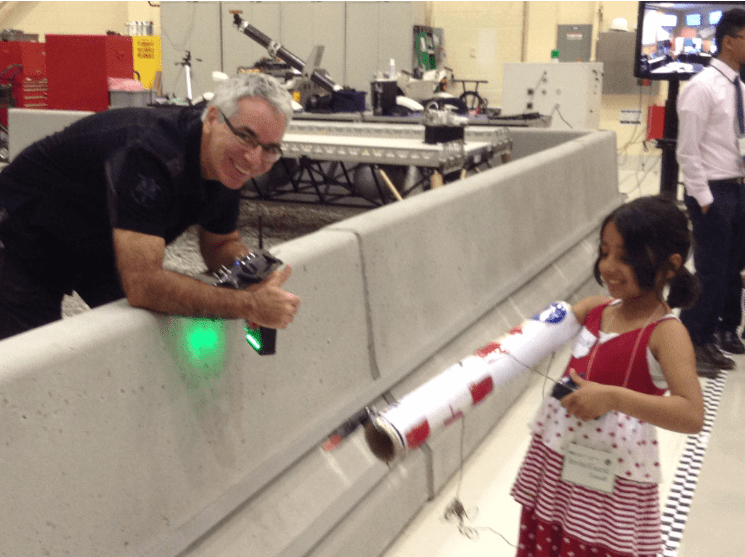
We also showed our model of Canada arm to children of staff members who were present at the Canadian Space Agency.
Demonstrating our Canadarm to children of other staff members
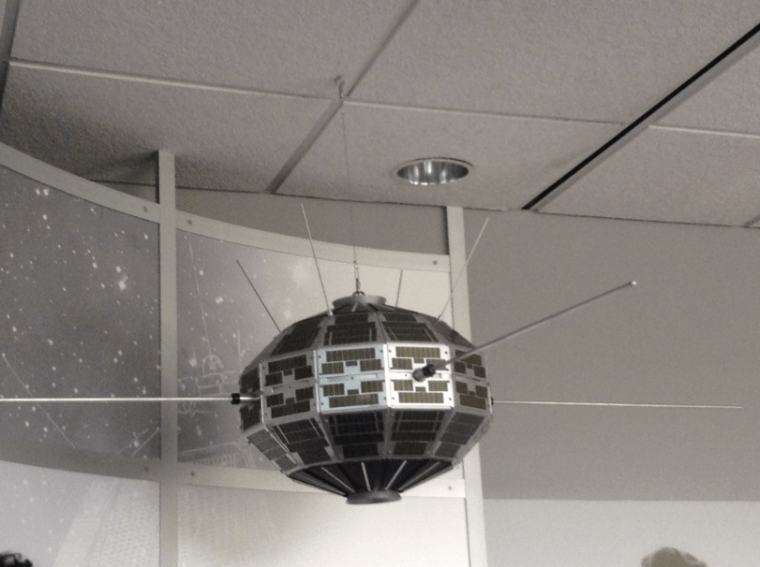
On the way out, we saw a model of the Canadian satellite, Alouette -1 and the original camera roll on which it had captured the images from space. Alouette (the French translation of the “Lark” bird) was launched on September 29, 1962. It ushered Canada in the space age as only the Russians and the Americans had designed and built Earth viewing satellites so far.
Alouette Satellite Model – Canada’s first satellite
And where else to keep meeting astronauts? But at the Canadian Space Agency. Just before leaving we ended up meeting Astronaut Jeremy Hansen once again for a few words and saying goodbyes.
Thank you, Jeremy, for the inspiration and taking time out for us
We thank Andrea and Nathalie for their awesomeness and for making sure that we have a fun-filled memorable day. It was a very rewarding experience.
Thank you, Nathalie!
Thank you, Andrea!
Thank you in Canadian Space Agency for a memorable visit. We will be there back again!
Arushi, Vikas and Artash saying goodbye to the Canadian Space Agency
2025 Third Grand Award, International Science and Engineering Fair, USA. 2023 Second Prize Winner – European Union Contest for Young Scientists (EUCYS). Best of the Fair Award, Gold Medal, Top of the Category, Youth Can Innovate, and Excellence in Astronomy Awards at Canada Wide Science Fair 2023 and 2022. RISE 100 Global Winner, Silver Medal, International Science and Engineering Fair 2022, Gold Medal, Canada Wide Science Fair 2021, NASA SpaceApps Global 2020, Gold Medalist – IRIC North American Science Fair 2020, BMT Global Home STEM Challenge 2020. Micro:bit Challenge North America Runners Up 2020. NASA SpaceApps Toronto 2019, 2018, 2017, 2014. Imagining the Skies Award 2019. Jesse Ketchum Astronomy Award 2018. Hon. Mention at 2019 NASA Planetary Defense Conference. Emerald Code Grand Prize 2018. Canadian Space Apps 2017.